cycle three: something that tingles ~
Posted: May 1, 2024 Filed under: Final Project | Tags: Cycle 3 Leave a comment »In this iteration, i begin with an intention to :
– scale up the what I have in cycle 2 (eg: the number of sensors/motors, and imagery?)
– check out the depth camera (will it be more satisfying than webcam tracking?)
– another score for audience participation based on the feedback from cycle 2
– some touches on space design with more bubble wraps..
Here are how those goes…
/scale up/
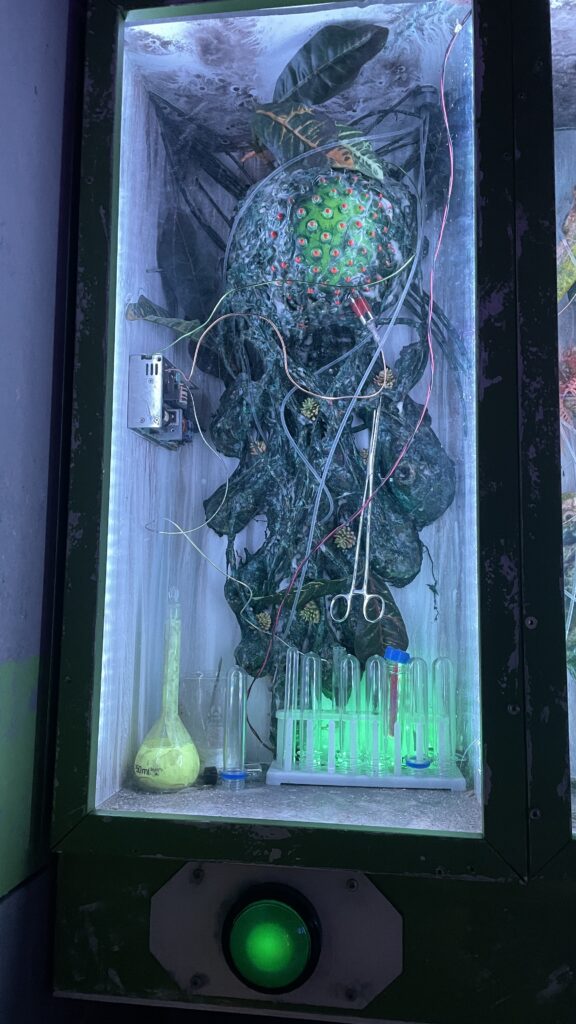
I added in more servo motors, this goes pretty smoothly, and the effects are instant — the number of servo wiggling gives it more of sense of a little creature.
I also attempted to add more flex/force sensor, but the data communication become very stuck, at times, Arduino is telling me that my board is disconnected, and the data does not go into Isadora smoothly at all. What I decide is: keep the sensors, and it is okay that the function is not going to be stable, at least it serves as a tactile tentacle for touching no matter it activates the visual or not.
I also tried to add a couple more imagery to have multiple scenes other than the oceanic scene I have been working with since the first cycle. I did make another 3 different imagery, but I feel that it kinda of become too much information packed there, and I cannot decide their sequence and relationship, so I decide leave them out for now and stick with my oceanic scene for the final cycle.
/depth cam?/
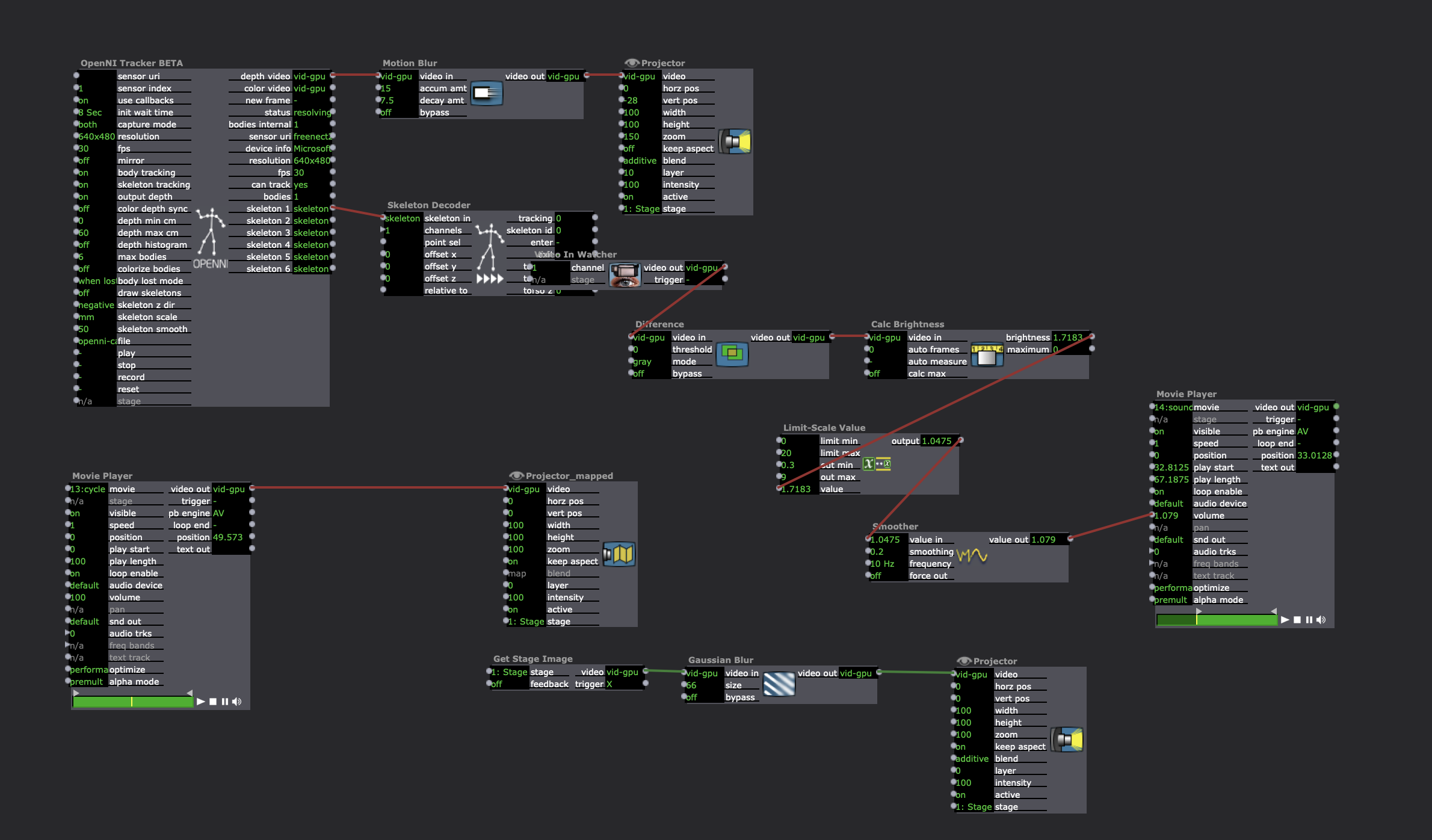
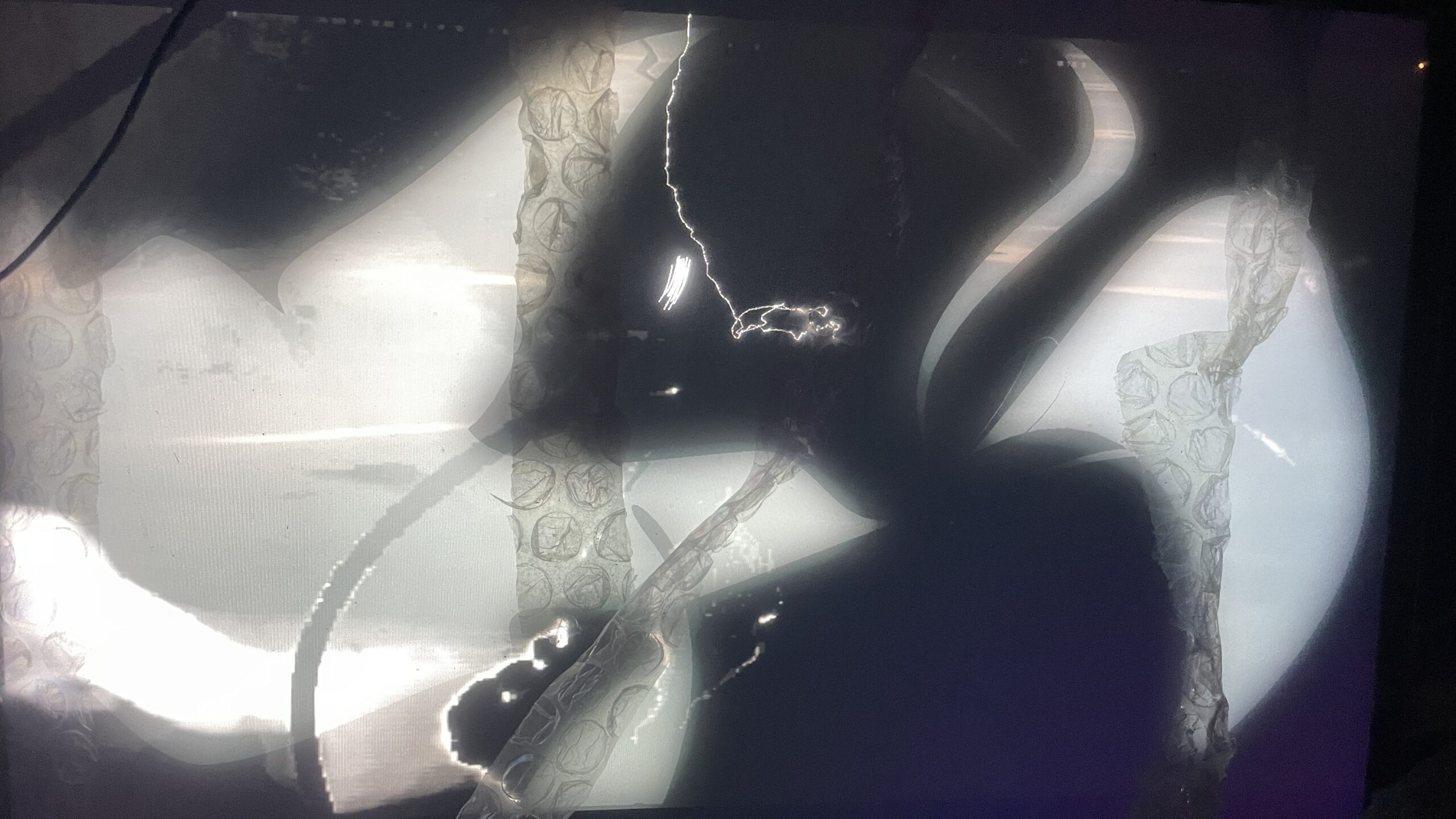
What I notice with the depth cam at first is that it keeps crashing Isadora, which is a bit frustrating, which propels me to work with it “lightly”. my initial intention of working with it is to see if it may serve better for body position tracking than webcam to animate the rope in my scene. But I also note that accurate tracking seems not matter too much in this work, so I just wanna see what’s the potential of depth cam. I think it does give a more accurate tracking, but the downside is that you have to be at a certain distance, and with the feet in the frame, so that the cam will start tracking your skeleton position, in this case it becomes less flexible than the eye++ actor. But what I find interesting with depth camera, is the white body-ghosty imagery it gives, so I ended up layering that on the video. And it works especially well with the dark environment.
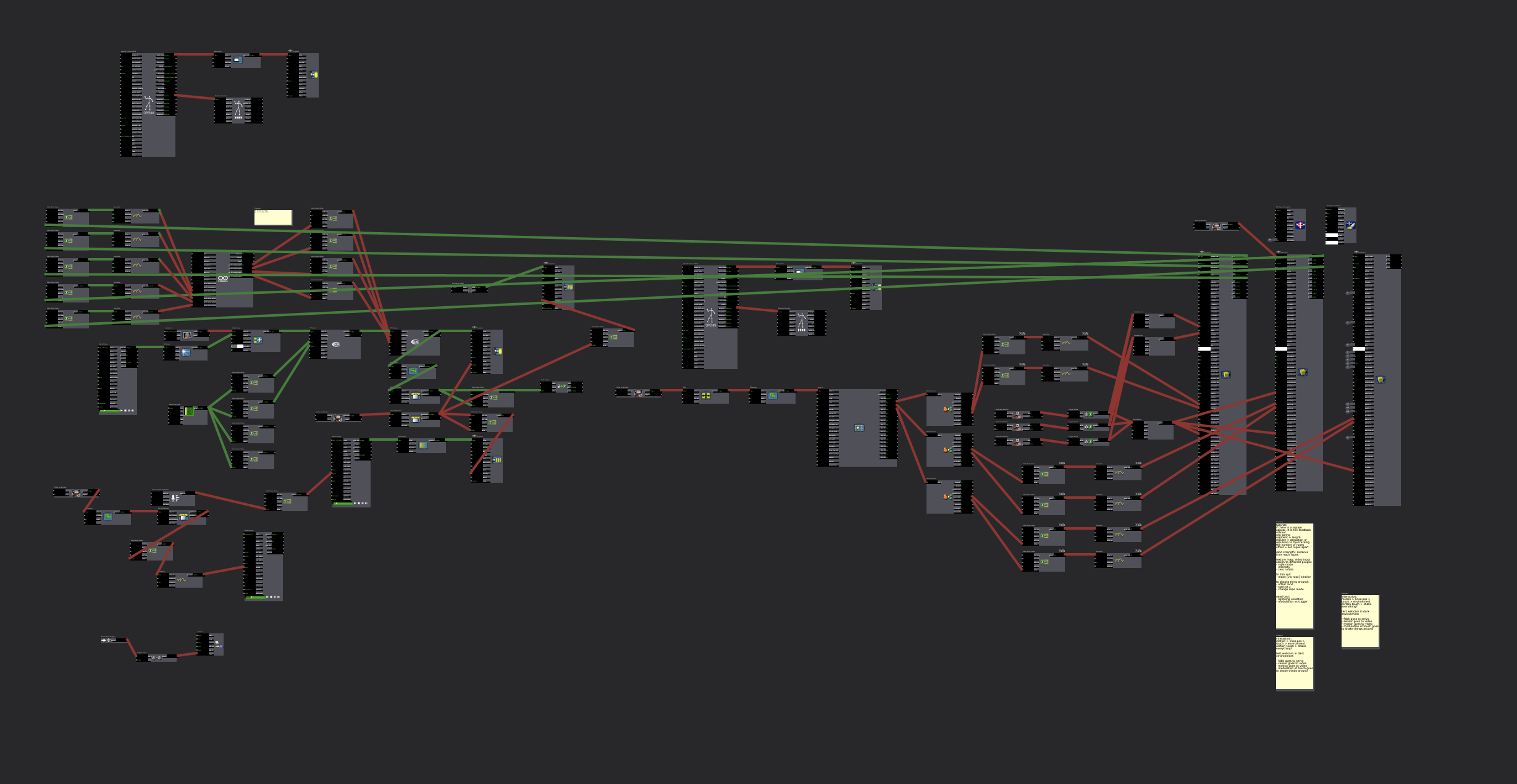
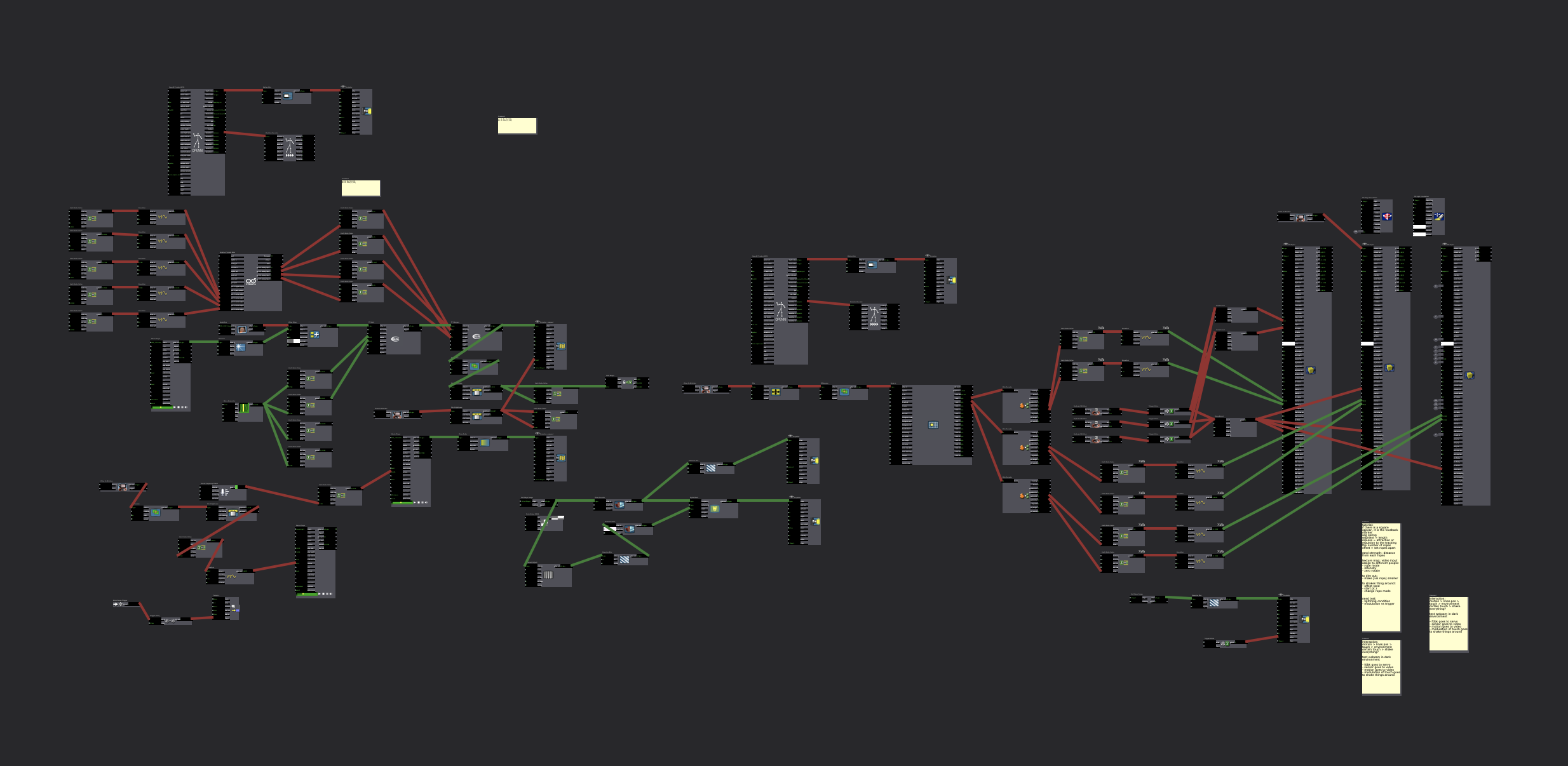
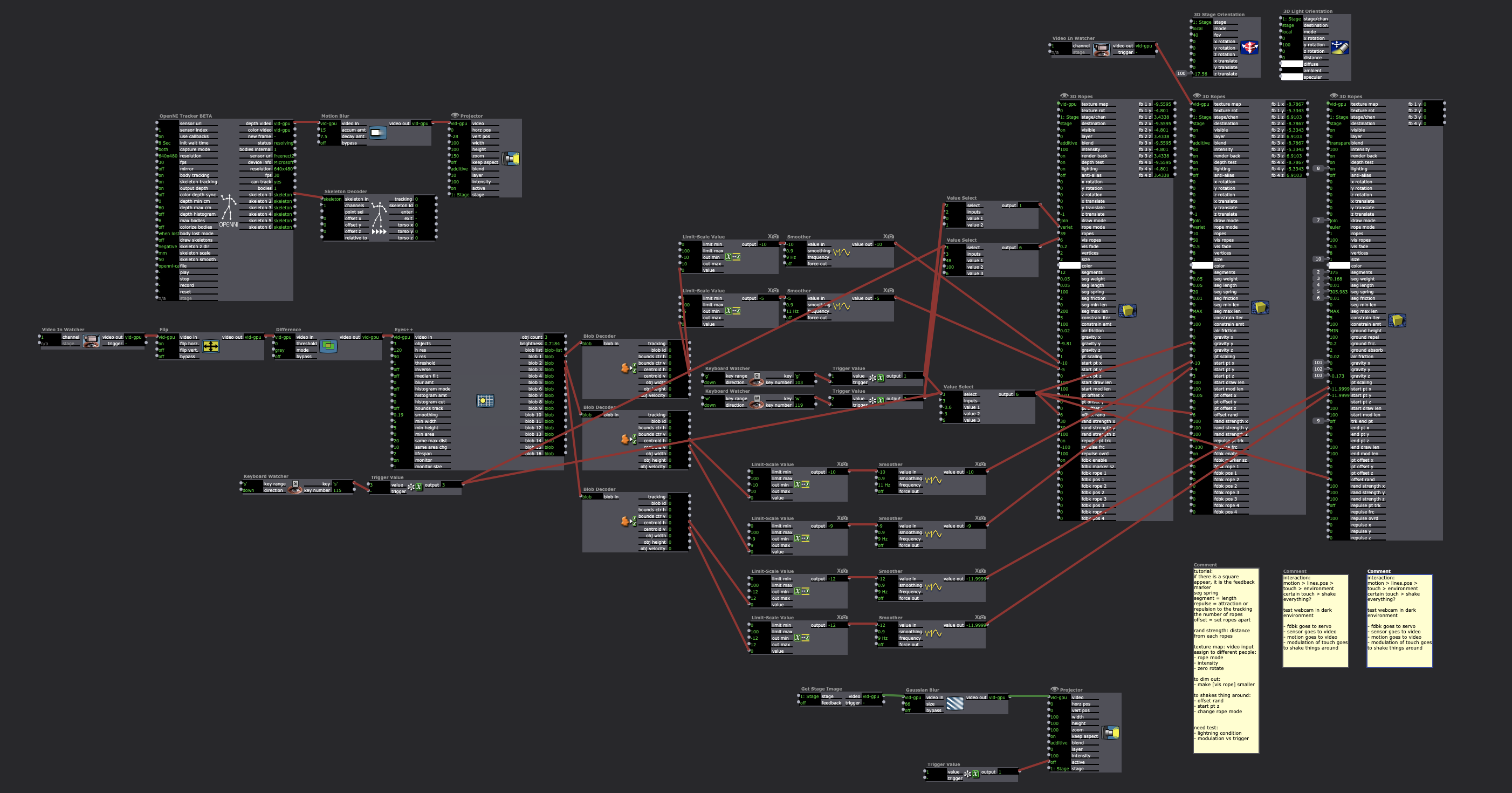
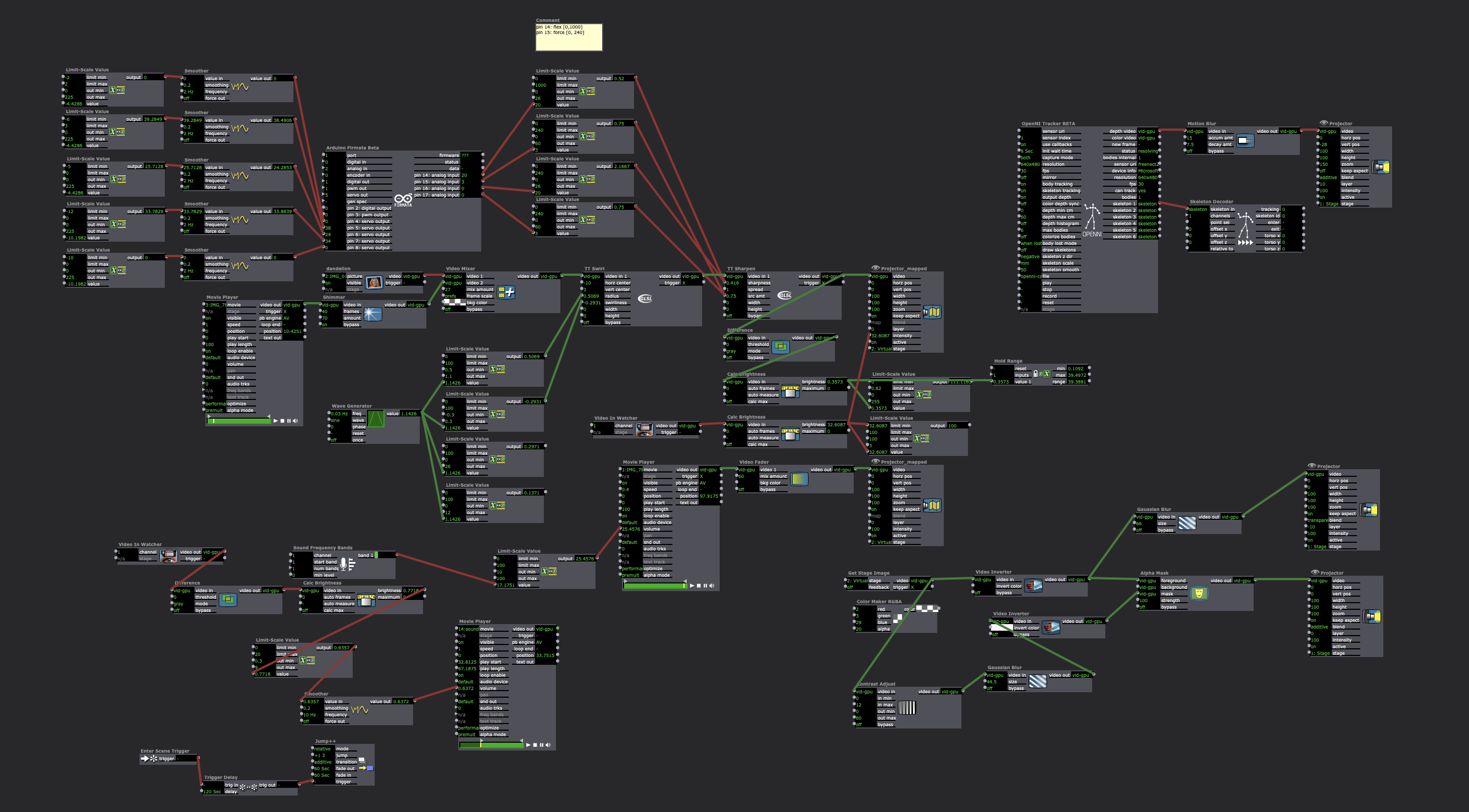
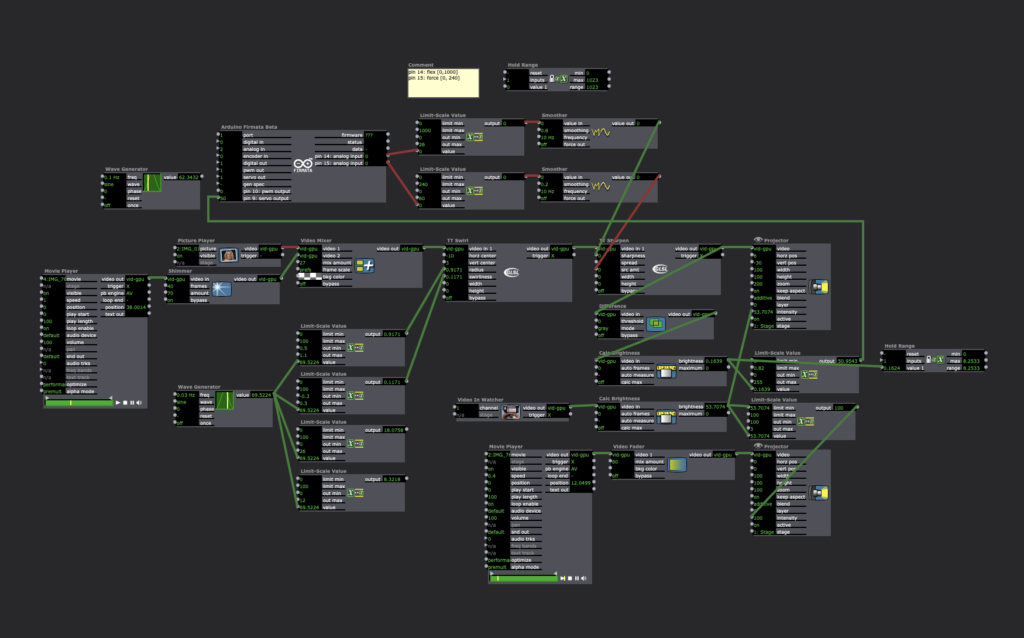
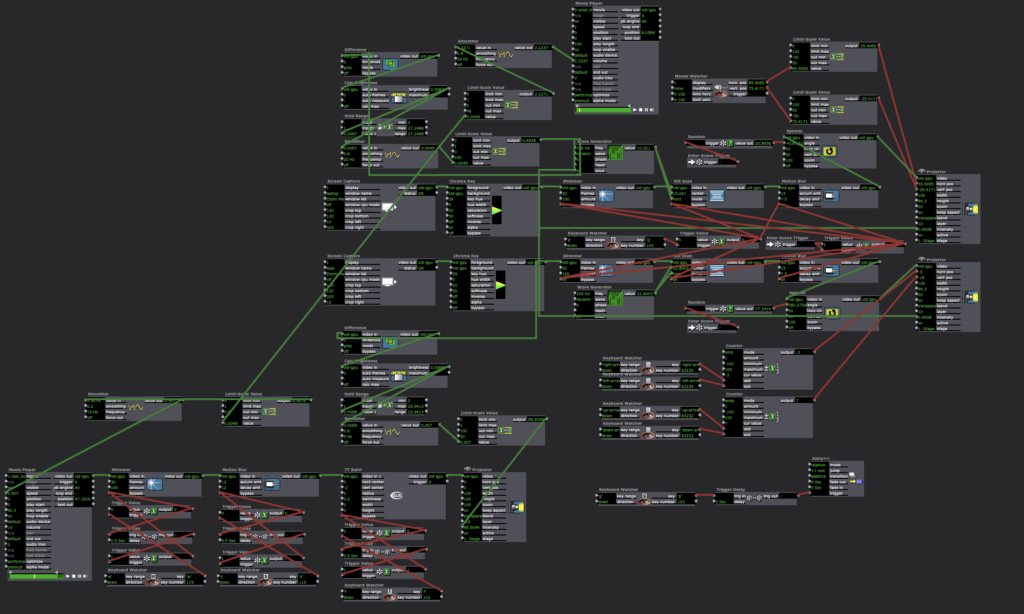
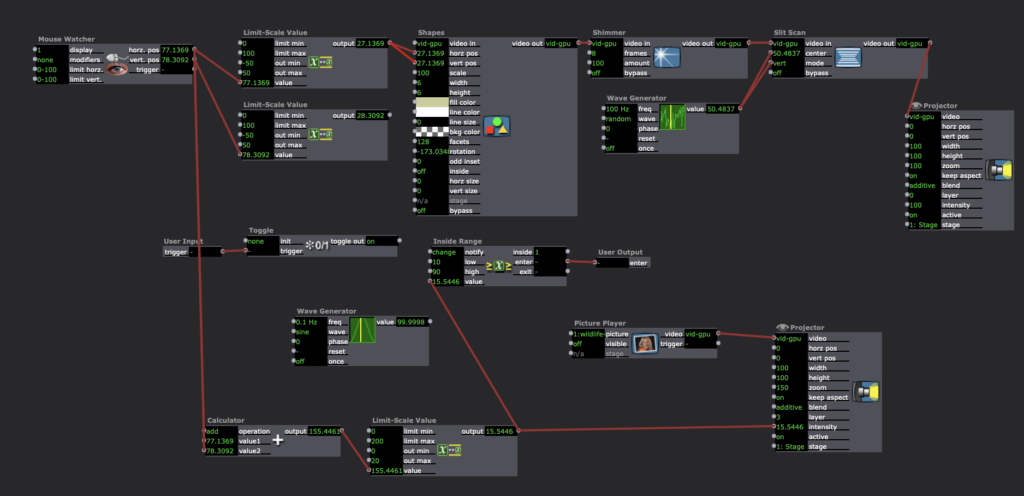
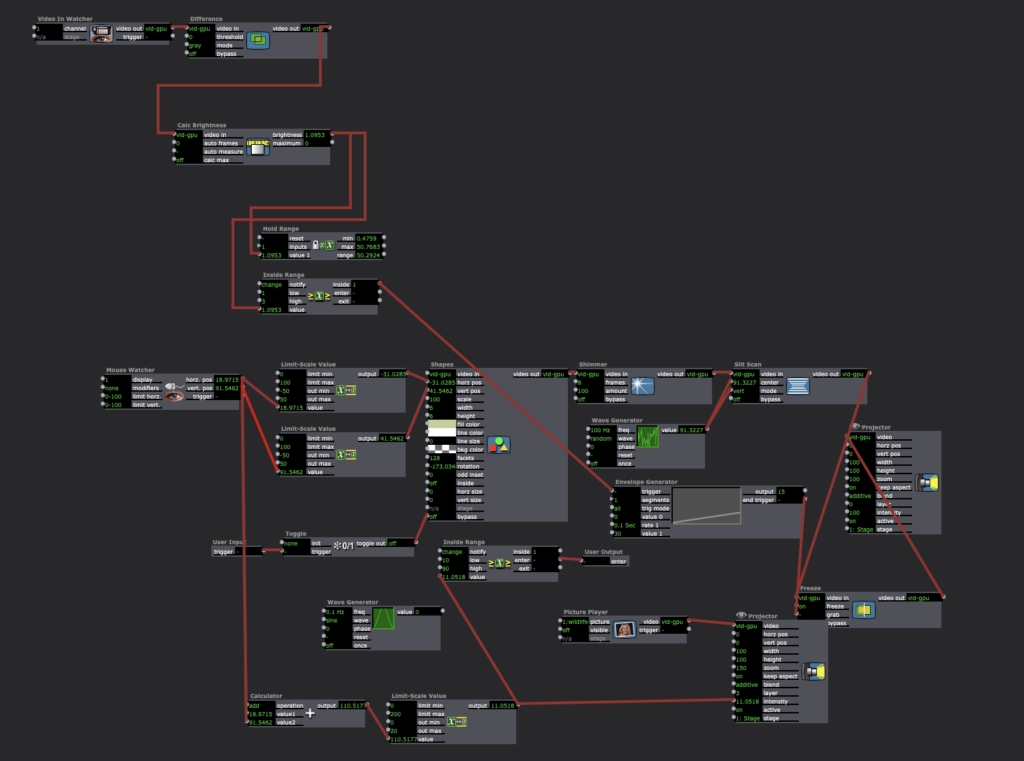
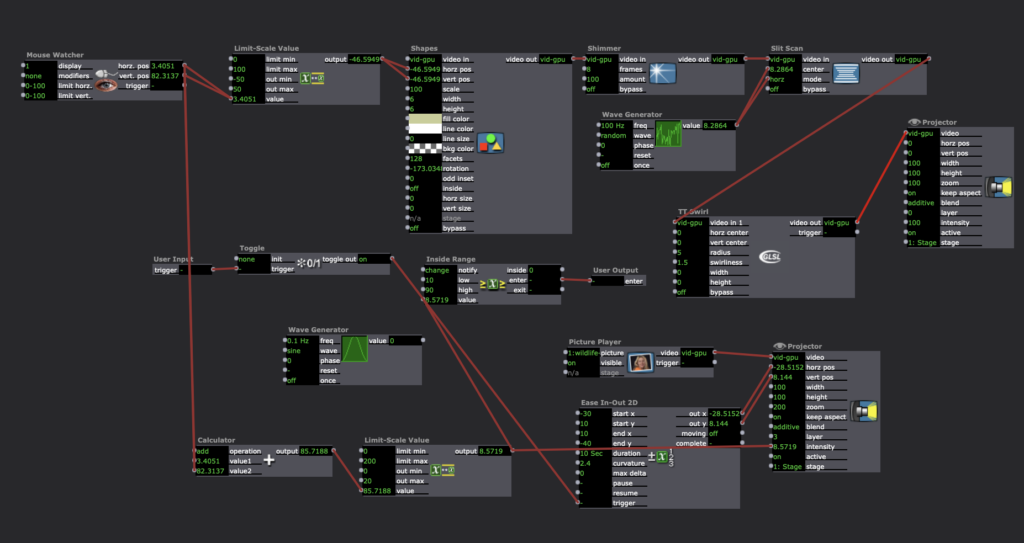
Here are the final Isadora patches:
/audience participation/
This time the score I decide to play with is: two people at a time, explore it. The rest are observers who can give to verbal cue to the people who are exploring — “pause” and “reverse”. Everyone can move around, in proximity or distance at any time.
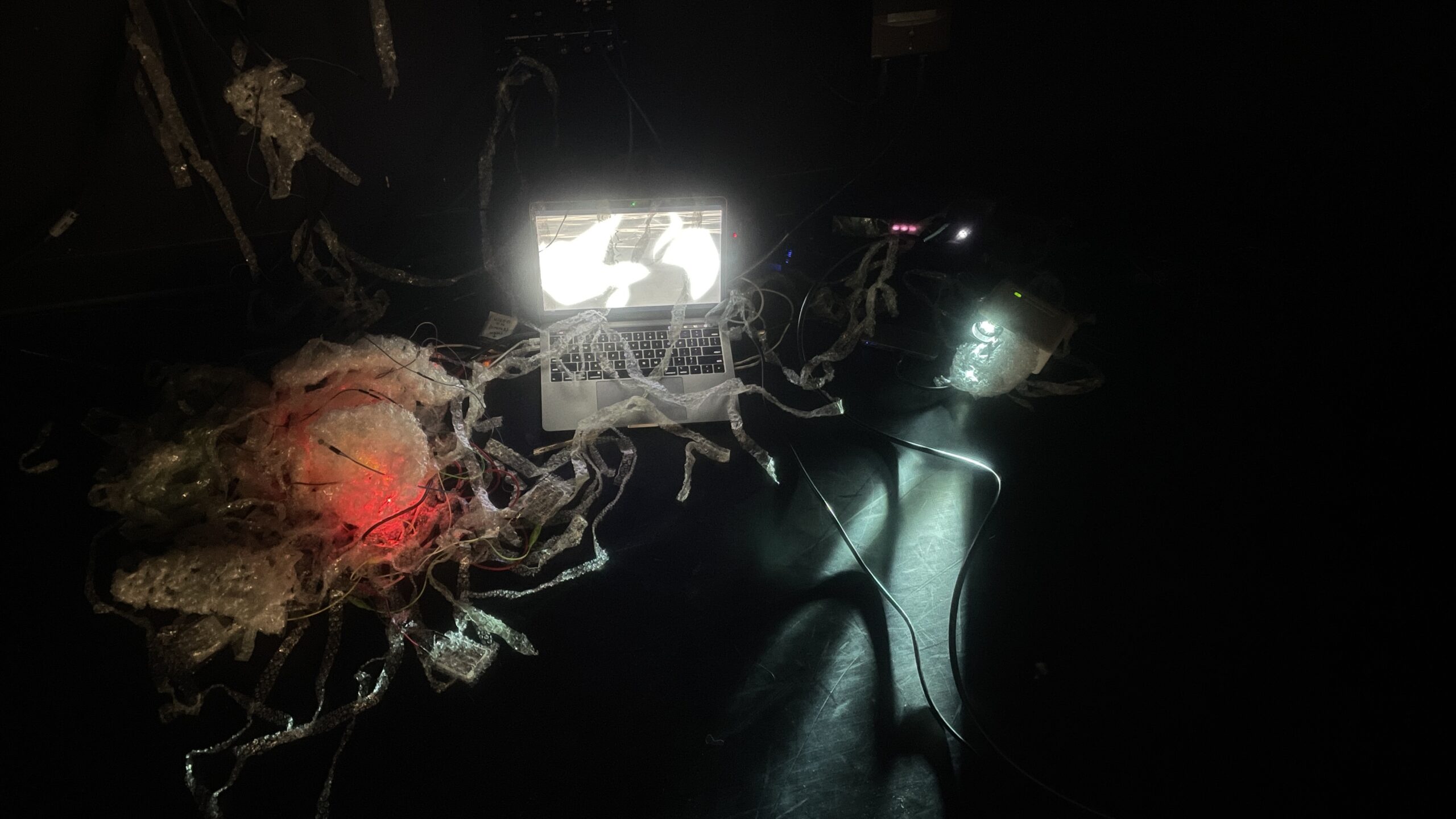
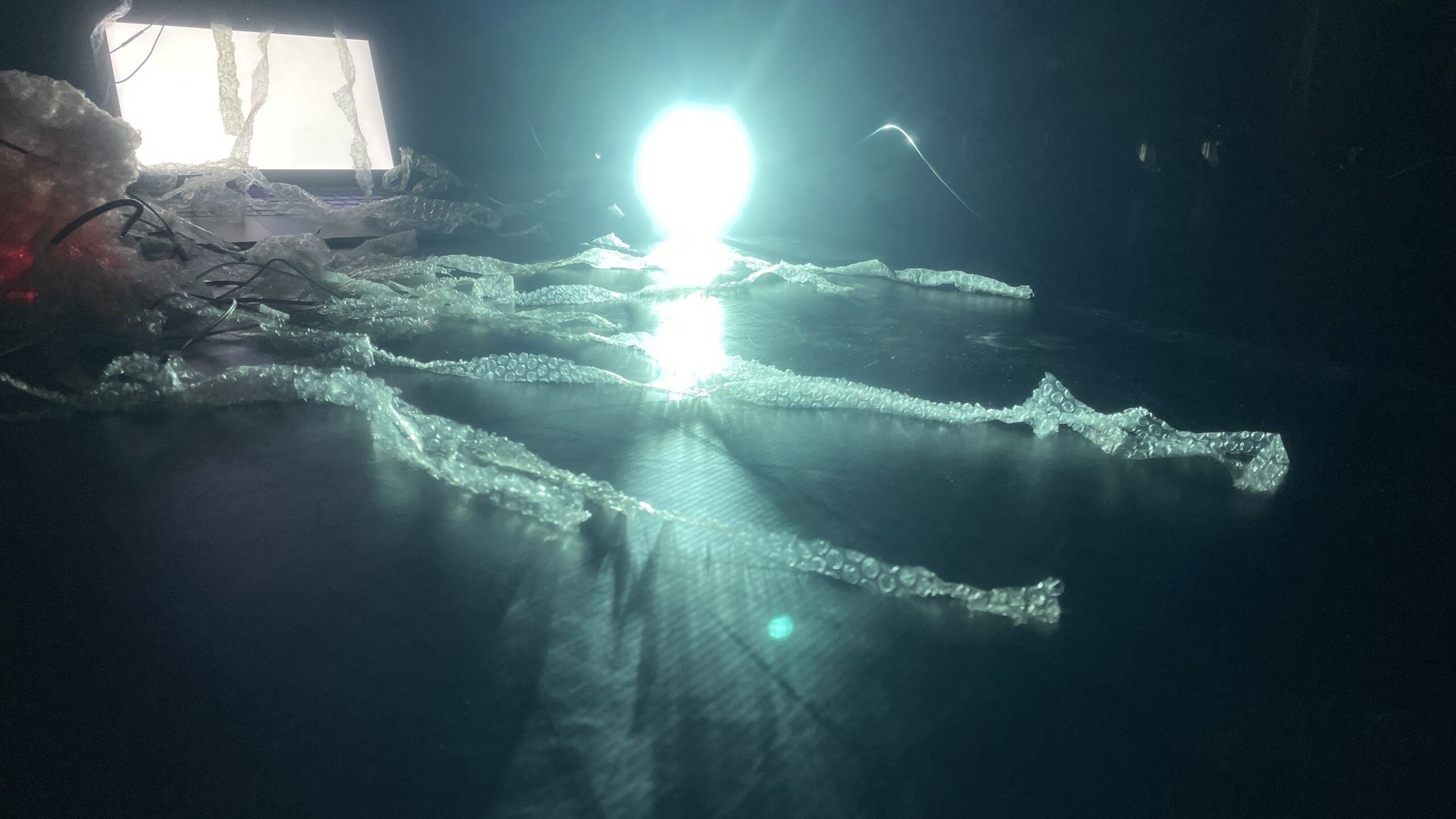
/space design/
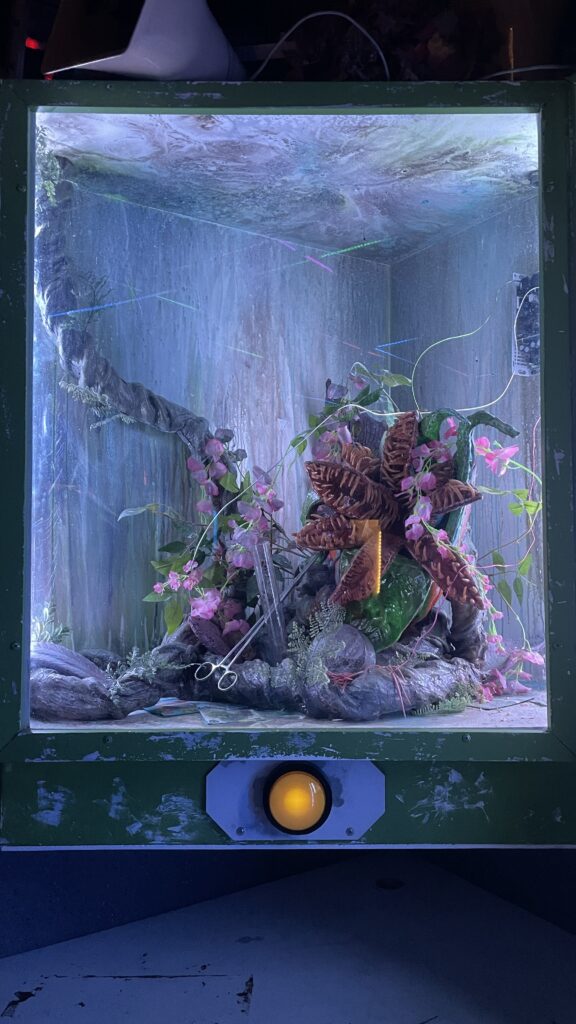
I wrapped and crocheted more bubble wrapper creatures in the space, tangling them through the wire, wall, charger, whatever happen to be in that corner that day. It’s like a mycelium growing on whatever environment there is, leaking out of the constructed space.




Feedback from folks and future iterations?
I really appreciate everyone’s engagement with this work and the discussions. Several people touches on the feeling of “jellyfish”, “little creature”, “fragile”, “desire to touch with care”, “a bit creepy?”. I am interested in all those visceral responses. At the beginning of cycle one, I was really interested in this modulation of touch, especially at a subtle scale, which I then find it hard to incite with certain technology mechanism, but it is so delightful to hear that the way the material composed actually evoke that kind of touch I am looking for. I am also interested in what Alex mentioned about it being like an “visual ASMR”, which I am gonna look into further. how to make visual/audio tactile is something really intrigues me. Also, I think I mentioned earlier that an idea I am working with in my MFA research is “feral fringe”, which is more of a sensation-imagery that comes to me, and through making works around this idea, it’s actually helping me to approach closer to what “feral fringe” actually refers to for me. I noticed that a lot of choice I made in this work are very intuitive (more “feel so” than “think so”) – eg: in the corner, the position of the curtain, and the layered imagery, the tilted projector, etc. Hearing people’s pointing out those help me to delve further into: what is a palpable sense of “feral fringe” ~
cycle two
Posted: May 1, 2024 Filed under: Final Project | Tags: Cycle 2 Leave a comment »I started my cycle 2 with exploring about the 3d rope actor. I was very curious about it, but didn’t get to delve into this in cycle 1, so I catch up with that. I began with this tutorial, which is really helpful.
The imagery of strings wildly dangling is really intriguing, echoing with the video imagery I had for cycle 1. To make it more engaging for the participant, I think of this way of using the eye++ actor to track the motion of multiple participant and let that affect the location of the strings.
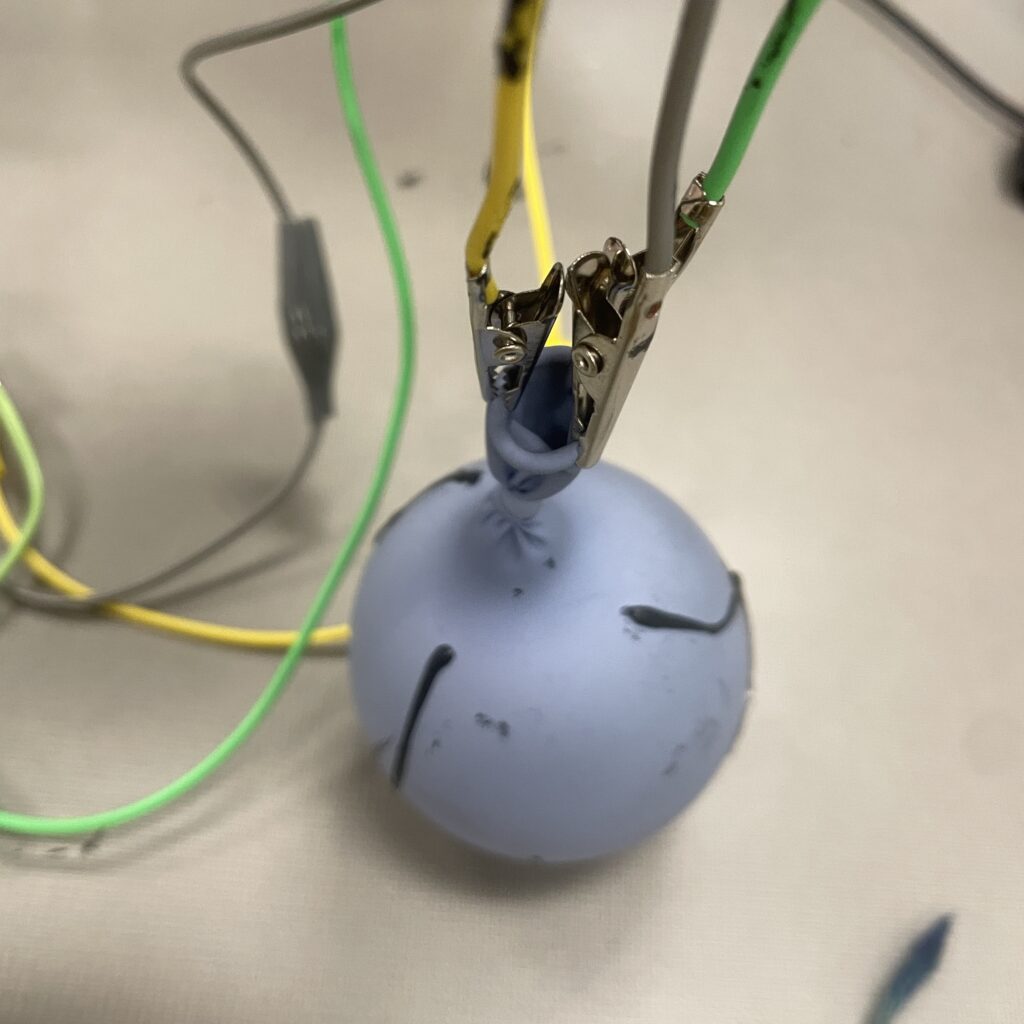
Along with the sensors connected to Arduino from cycle one, I also made some touch sensors with the makeymakey alligator clip wires, foil, foam, and bubble wrap slices to give it a squeezy feeling. And I used some crocheted bubble wrapper, to wrap my Arduino & makeymakey kit inside, with the wires dangling out along the bubble wrap thin slices like the jellyfish’s tentacles – the intention is to give it a vibe like an amoeba creature.
I played with projection mapping and space set-up in the molab on Tuesday’s class, but need more time to mess around with it.
The observation and feedback from the audience is really helpful and interesting 🙂 I didn’t come up with a satisfying idea regarding instruction for audience. So I decide to let audience (two at a time) free explore in the space. I like how people got crawling to the ground, I notice that this bodily perspective is interesting for exploring this work; also love the feedback from Alex saying that it is interesting to notice the two people’s silhouette figuring out what is happening and the sound of murmuring; and I appreciating Alex pointing out the deliberate choice of having projector set in a corner, hidden and tilted. I am really interested in the idea of reimagining the optimal/normal functionality, and instead what I may call “tuning to the glitches” (by which I am not referring to the aesthetic of glitch, but a condition of unpredictable, instability, and “feral”)
Thinking along, I am relating to this mode of audiencing in this artist’s work:
https://artscenter.duke.edu/event/amendment-a-social-choreography-by-michael-klien
For the final cycle, i am going to:
– now that I have sensor and servo working, I am considering adding the number of it – “scale up” a little bit
– incorporate sound
– fine-tune webcam tracking
– play with the set design and projection mapping in molab
– continue wondering about modes of audience participation
cycle one
Posted: March 28, 2024 Filed under: Final Project Leave a comment »For cycle one, i keep my goal simple – to explore and figure out my multiple resources and the combined possibilities of arduino (and sensors), isadora, and makeymakey.
i learned how to connect arduino with isadora, and explored touch-related sensors and actuators. I started with capacitive touch because it can be achieved with just connecting wires to the pins, and doesn’t require me to purchase extra sensors, but it turns out that the fact that it does not give analog output makes it hard to send value to isadora with the Firmata Actor. (while i did find that it could be possible to use serial communication instead of Firmata Actor, but that seems more coding, and I think that’s too much for now, i may return to this in the future). So I decided to use force sensor, flex sensor, and the servo.
I played with layering some videos together (some of the footages i collected), all of them shared something in common (an aesthetic i am looking for) – the meandering/stochastic motion of feral fringe. I tested out some parameters that would allow subtle change to the visual. Then i tried send the value from my sensor to affect the subtle changes.
some tutorials that i find helpful:
(thanks Takahiro for sharing this about Firmata in his blog post!):
https://www.instructables.com/Arduino-Installing-Standard-Firmata/
https://www.instructables.com/How-To-Use-Touch-Sensors-With-Arduino/
https://docs.arduino.cc/learn/electronics/servo-motors/
Force sensor: https://learn.sparkfun.com/tutorials/force-sensitive-resistor-hookup-guide/all
Flex sensor: https://learn.sparkfun.com/tutorials/flex-sensor-hookup-guide/all
I was also thinking about the score for audience, that supports the intention of [shared agency, haptic experience (with the wires as well), subtle sensations], and I really love the sensation of the wires dangling and twitching like tentacles ~ i would love for people to engage with it:
In pairs, one person will close eyes, the other person will guide them in the space. While roaming around in the space, eye-closed person will explore the space with touch, which then affects visuals/sounds/sensations in the space.
This source from an activity we did in Mexico, also i find another artist did something similar. i find this audiencing quite effective in the sense that, eye-closed enables that people don’t select and manipulate the object by judging its appearance or functions, which makes new “worlding” happen. And, with eyes closed, there is an extra layer of care in our touch and pace. This also resonates with what i studied in dance artist Nita Little’s theory of “chunky attention” versus “thin-sliced attention”. With eyes closed, we don’t come to recognize a thing as a chunky whole thing and assume we already know it, but we are constantly researching every bit of it as our touch goes through it. With the pair format, we are also constantly framing the “scene” for each other.
Envisioning space use for final cycle:
– in molab
– a projector (i am thinking of using my own tiny projector, because it’s light and easy to move, i probably wanna audience to play with touch/move that as well)
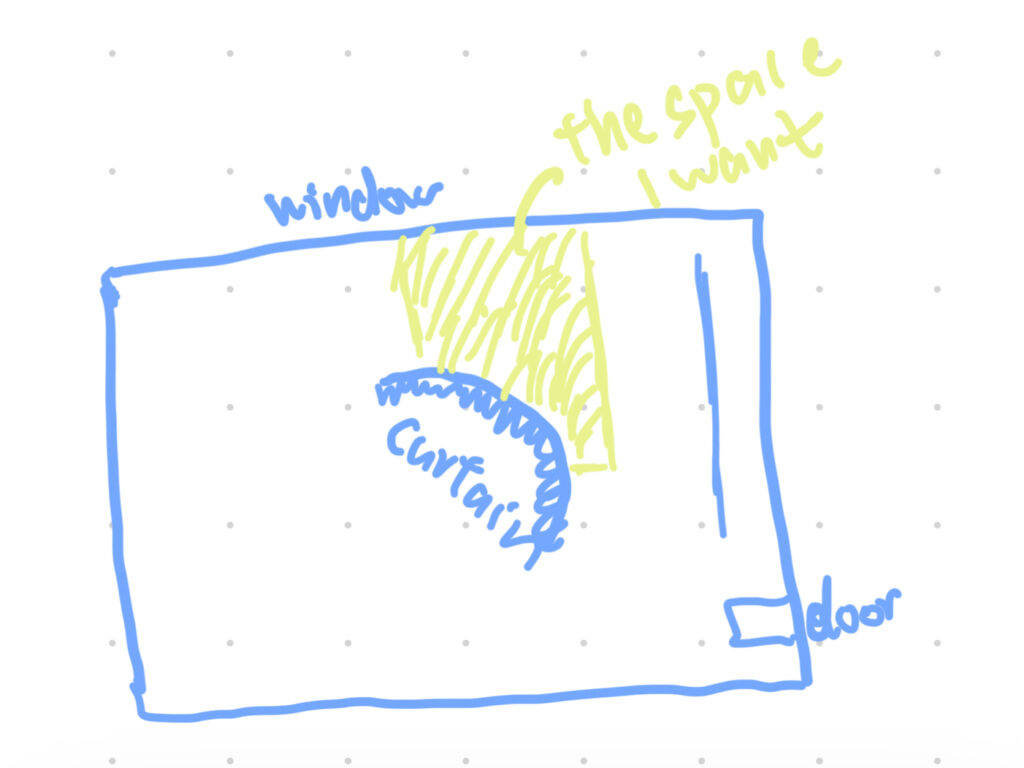
– space wise, i am thinking that part where the curtain track goes out (see sketch below, the light green area), but i am also flexible. with the next circles, i need to test out how to hook my wires, how long the power cable would be in order to figure out the realistic spacial design…
Pressure project 3 – sharing a wandering?
Posted: March 5, 2024 Filed under: Pressure Project 3 Leave a comment »When designing this experience in response to the prompt of “mystery is revealed”, my thought is that, I don’t want to be the one in control to reveal the mystery, but I wanna send the participants on a journey where they disclose mystery for themselves.
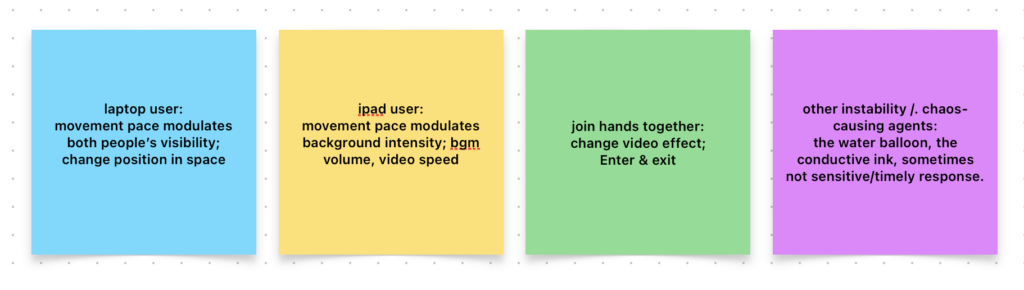
I am interested in what shared agency and reciprocal relationship can do. So I devised this experience where the duet have to work together to decide the journey for themselves. I am interested in haptic experience, so some trigger requires the duet to hold hand together. So the experience is co-created by both participants and some random factors:
I thought of the resource of using the green screen from zoom to carve out the human out and compose it to the video background. I think I start with thinking of using zoom quite spontaneously even without knowing how exactly I wanna use, probably because of the past three years of weekly dancing in zoom…
And the videos themselves are composed of a couple of clips that I took with my phone years ago. To me, all these clips share a kind of texture that feels visceral and has a potential of touching the unconsciousness. That’s why I choose to use these specific imagery for this project whose theme is related to mystery.
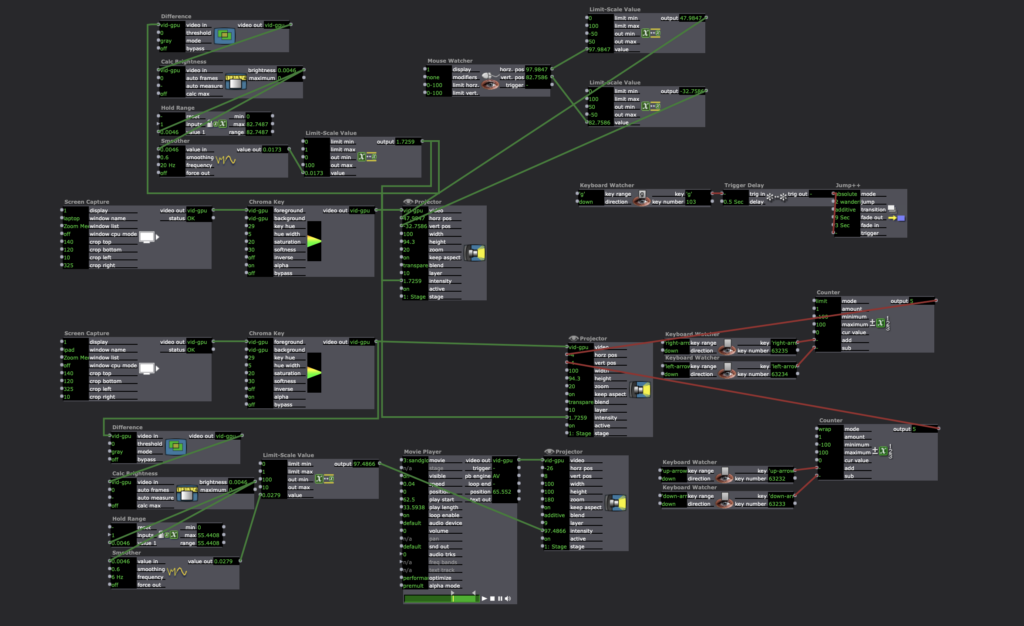
Isadora patch:

Makeymakey connection:

i kinda of appreciate the time contraints of 10 hours, it takes the pressure of me by pushing me to make quicker decisions and letting go when i was wavering between too many ideas.
Several things I bumped into but not yet figured out, and am interested in exploring further is:
– how to elicit and engage with the fragility and instability side of technology. I was noticing it intriguing about the use of a water-soaked thread as a conductor, which involves an uncertainty of how long it takes for the water to evaporate that it eventually becomes not conductive. The same goes with the use of conductive ink – after I painted it onto the plastic strap, the ink tends to break in-between easily. Also the design of water balloon part…The fragility and uncertainty here are fascinating to me, but I haven’t figured out how to more intentionally engage with it.
– another desired I had is to have the participants touching the webcam, (think about relations of visual and haptic), but I drop the idea because it is too much to incorporate here.
– and how to communicate such interaction to the audience, and how verbal or nonverbal communication have different affects.
Pressure Project 2: visiting the Other World
Posted: February 6, 2024 Filed under: Pressure Project 2 Leave a comment »This is the system I picked to spend time observing:

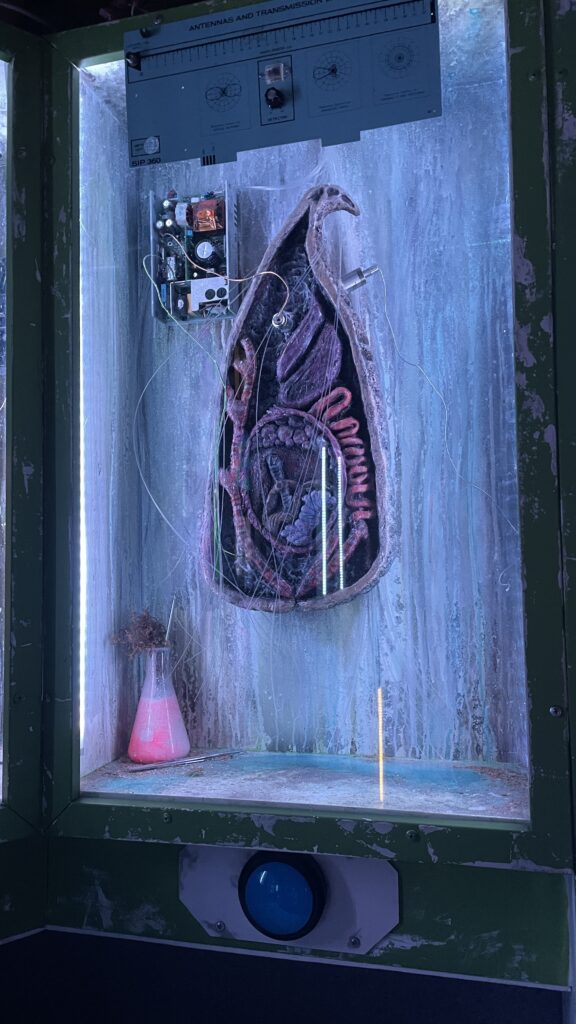

I decided to pause at this system because by the time I arrived here, it happened that some people are engaged with solving the puzzles of this interaction. I got intrigued by that. Also, I was very drawn to the design (and the non-interactive components) in the space as well – a poster on the wall indicate the connection between the nervous system and the gut (a topic fascinating to me!), and a glass window, the drawer of which can be opened, where there are many weirdly-interesting ceramic creatures.
Diagram of the system (upper)
Diagram of people interacting (lower)
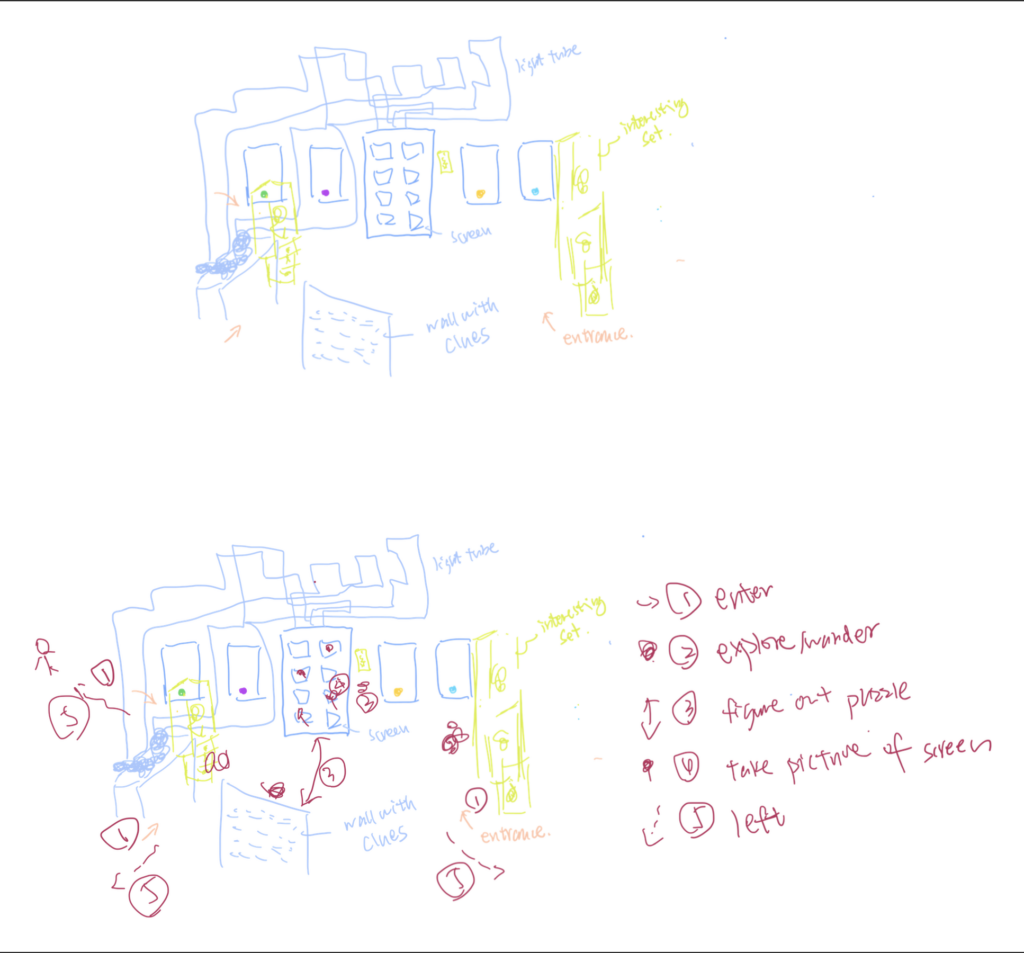
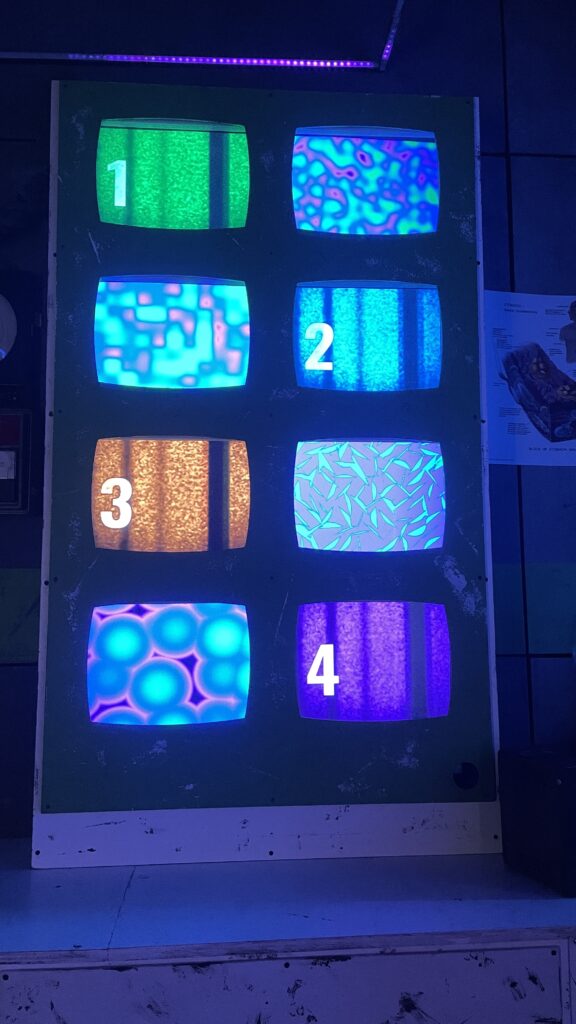
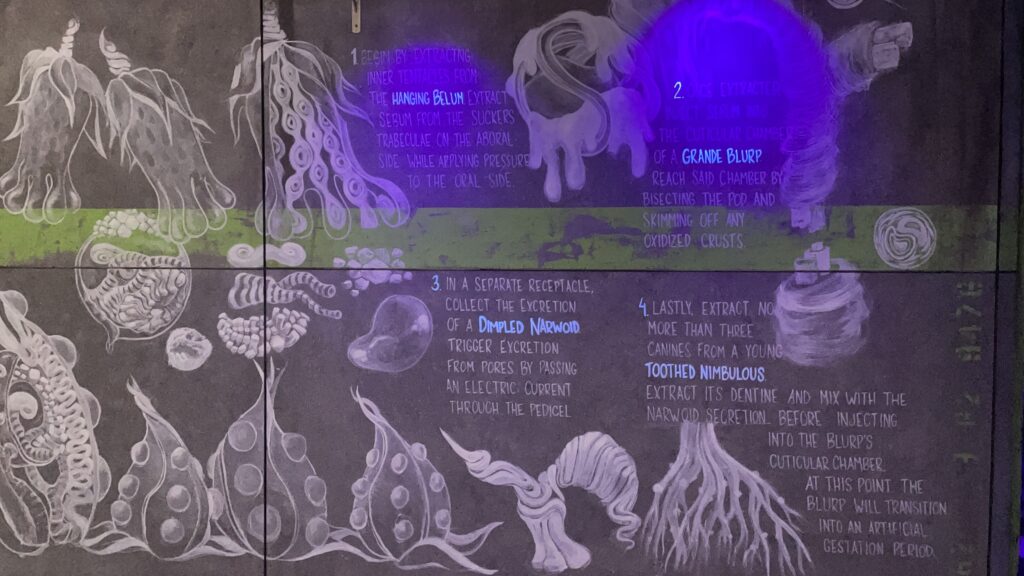
People begin their experience by arriving at the space from three different directions. They first register their arrival at a new interactive system. Then some would observe the space first, touch the structure, or go directly to push a button on the glass boxes to see what may trigger. The button is the key to interaction, however, it needs to be pushed in a certain order to trigger an ultimate effect, otherwise it is just the light traveling through the channel, while some people might be satisfied by this and go on to the next one, other people are determined to figure out. There is an experimental guideline (with some words highlighted which seems to be the clues) on a wall, it is the key to solving the puzzle (the order of pushing the four buttons). After pushing the buttons in the correct order, a pattern appears on the screen, with some light effects, some people take a quick picture of the screen and go on to the next room.
Re-design the system:
What I am interested in doing is making people less goal-oriented, it seems that once people solve the puzzle, they are no longer interested in exploring the system again, or not even pay attention to the interesting set design in the room. The modification I wanna make:
– the button can be replaced with the shape of a tentacle, or something in the shape of a laboratory tool (to echo with the overall vibe)
– each time they solve the button puzzle, a different pattern would appear.
– the pattern is in the appearance of a creature in correspondence to the real object in space, and then they need to find that object, and touch it
– the touch has to be in a range of a certain pressure, for a certain length, (I wanna some more sensorial experience, rather than just a trigger – task complete.), preferably, the touch has to be completely between two people. (Does this sounds to nefarious?)
pressure project 1 – murmuration
Posted: January 28, 2024 Filed under: Pressure Project I Leave a comment »idea/sparks/resources
This project is inspired by the idea of “murmuration”. It just happened that during the past week, the idea “murmuration” kept surfacing: i didn’t know this term referring to the “flocking of starling” until last week, when i was having a conversation with a teacher about the piece that i was working on last semester about “murmuring”; then i come across this term again while reading Emergent Strategy, which describes complex system. Since it is so present, i was like, maybe i am going to take it as the inspiration for this pressure project. I gathered some murmuration image from the internet, they are mesmerizing!




Meanwhile, i also remind myself to take them as inspiration without the ambition to representing/mimicking the visual so as to give more space for free play 🙂
processes
I start with trying to figure out the function of different actors, how to transition from scene to scene, and how to generate a loop. As i begin to have a better idea of the functions of the actors, i set some small intentions: i want some shapes that are tiny, not identical, and there are a lot of them, they are moving relationally/collectively, but also have some individual subtle differences in each of them.
after i got a thing that seems working, i began to duplicate the instances and add variation among them to make it appears a bit more randomized and complicated but still have recognizable patterns.
after i got a simple system loop that is working, i began to refine the aesthetics to make it more satisfying: i would like some (what i would call as) “murmuring kinesthetic quality” (i was recalling the physical quality i engaged with in that murmuring dance piece), which is essentially maybe a stuttering-morphing-nudging quality? i did this by connecting a wave generator (random wave) to the hori/vert mode of the slit scan so that it keeps shifting between horizon/vertical modes; in one of the scene, i also adds in the freeze actor. To make the processes more interesting for the viewer, i decided to explore some interaction, i used the mouse watcher (affecting the position of the flocking particles), and the webcam (linked to the difference actor and cal brightness actor, and eventually linked to the freeze actor to trigger to “grab”).
after refining the aesthetics, i repeat the process of duplicating the re-fined instances again, to re-create the system loop. i repeat this process a couple of times as i added in other details (eg: the swirling actor, layering the background pictures etc.)
performance

reflection
I enjoyed everyone’s sharing in class, and that each person’s very different works reflect our own personal history and reveal something about ourselves. I am also reflecting on Alex’s comment of me being part of the performance while interacting with the screen. This also makes me think about it is interesting in itself how different people would react to a webcam interaction differently in their body language. As we go on, I would like to keep being aware of how to design interaction in a way that leaves space for partcipants to have some “mysterious” uncovering of the interaction while not confusing.
Regarding the 5 hours time experience, as i shared in class, if i were to do it again, i would like to intentionally set more pauses in-between so as to refresh my attention, instead of falling into the mechanical task-achieving state (this time i went for 3.5 h + 0.5 h + 1 h, the 3.5h part feels a lot and that my attentiveness/excitement is fading away after 2hish). Also, I think the time limits is a great resource to allow me to gauge what i could possibly do in certain amounts of time.
Bump: Tamryn McDermott’s “PP1: Breathing the text”
Posted: January 22, 2024 Filed under: Uncategorized Leave a comment »This is pressure project 1 from Tamryn McDermott, it sparks two thoughts in me:
– how to integrate kinesthetic sensation with audio-visual (in her case, the breath); i think in her project, this works well with manipulating the pace of the book’s contracting motion in accordance with the breathing rhythm. Also, i am especially interested in integrating haptic interaction.
– in the last paragraph, she mentioned the desire to introduce “more randomness”, which makes me ponder about the relationship between randomness, complexity, and the range/scale of control.